RIGID_BODY_JOINT
Rigid bodies
"Optional title"
coid
entype${}_1$, enid${}_1$, entype${}_2$, enid${}_2$, bc${}_{tr}$, bc${}_{rot}$, csysid${}_1$, csysid${}_2$
$rx-$, $rx+$, $ry-$, $ry+$, $rz-$, $rz+$, $gap$, $\xi$, $pfac$
cid${}_{Tx}$, cid${}_{Ty}$, cid${}_{Tz}$, $T^f_x$, $T^f_y$, $T^f_z$, cid${}_{Fx}$, cid${}_{Fy}$, cid${}_{Fz}$
Parameter definition
Description
This command defines a joint between two rigid bodies or rigid connectors (see CONNECTOR_RIGID).
The joint is initially centered at the origin of csysid${}_1$. csysid${}_1$ also defines initial local directions in which the joint constraints are defined and forces/torques are output. csysid${}_2$ is used to define non-zero relative rotations at the initial state. csysid${}_2$ is only needed if the free rotations are limited or if rotational resistance is defined.
The joint rotation angle is defined as the rotation of enid${}_2$ minus the rotation of enid${}_1$. A non-zero initial rotation angle can be defined though csysid${}_1$ and csysid${}_2$.
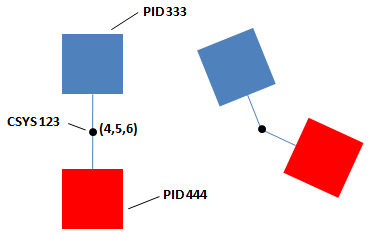
Example
Joint
The following commands define a joint with ID 10 between the rigid parts with ID's 333 and 444. All rotations are free.